

 联系我们
联系我们




1、XS1 电源接口
2、X7.1 附加轴 (7)电机接口 (焊钳或者行走轴)
3、X20 驱动电机接口 (轴 1-6)
4、X11 接口 (安全回路,可短接或者投入运行手动机器人)
5、X19 smartPAD-接口(示教器接口)
6、X21 RDC- 接口

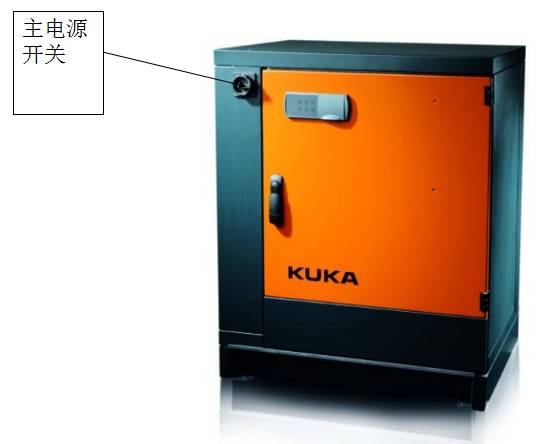
接线检查完毕,打开开关,顺时针方向,shou次开机时间比较长,耐心等待!
shou次开机,KCP的急停是按下去的,顺时针方向,拔起!

开机页面,显示以下查询:RDC 存储器和控制系统不一致 什么被更换了,用按键 机器人确认, 显示以下信息:网络配置已还原.用按键 OK确认。用按键 全部 OK确认在信息窗口可以被确认的所有信息。



在窗口故障排除助手中即显示可能的故障原因的概览。在该列表中选中字段:机器人或 RDC 存储器首次投入运行按下按键现在激活。窗口通用自动打开窗口通用通过关闭图标 关闭。 显示以下信息:已成功保存改动。用按键 OK确认硬件选项选择:


了解更多详情关注KUKA机器人官网
2023-04-07本文摘自网络
