

 联系我们
联系我们

一般来说,上下料关节型机器人的安装方式有三种:“地装式机器人搬运”、“地装行走轴机器人搬运”、“天吊行走轴机器人搬运”。
一、地装式机器人搬运系统
多数机床上下料系统运用于“地装式机器人搬运”,也称“岛式加工单元”,该系统以六轴机器人为中心岛,机床在其周围作环状布置,进行设备件的工件转送。集高效生产、稳定运行、节约空间等优势于一体,适合于狭窄空间场合的作业。
二、机器人的行走轴搬运系统
机器人配置了7轴地装导轨,行走导轨上面的上下料机器人运行速度快,有效负载大,有效地扩大了机器人的动作范围,使得该系统具有高效的扩展性。
三、天吊行走轴机器人搬运系统
天吊行走轴机器人搬运系统和地装机器人拥有同样实现复杂动作的可能。区别于地装式,其行走轴在机床上方,拥有节约地面空间的优点,且可以轻松适应机床在导轨两侧布置的方案,缩短导轨的长度。
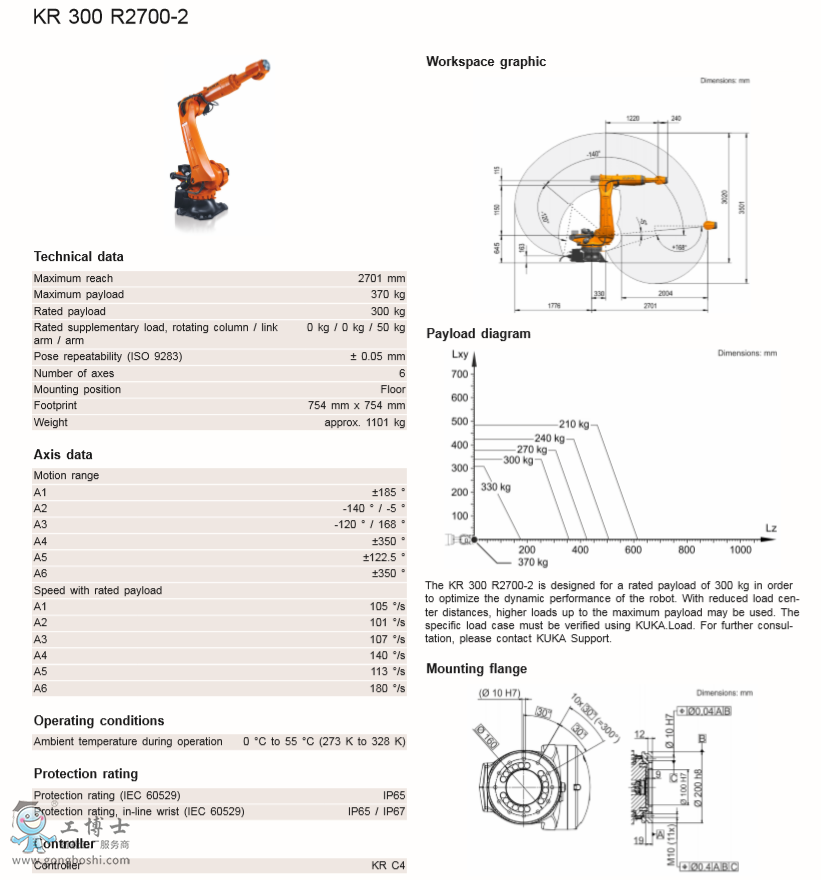
KUKA库卡机器人KR 300 R2700-2
KR QUANTEC系列将是库卡**款具有数字附件式运动模式的工业机器人。这是数字化的运动模式,可针对特定使用情况优化机器人的工作流程。例如,"Path Mode (路径模式)”可实现高精度的轨迹运行。"DynamicMode (动态模式)”允许更高的速度,从而将节拍时间降到*低。
更多产品信息,请点击关注:库卡机器人
图文来源网络,侵删
